进程互斥的软件实现方法详解
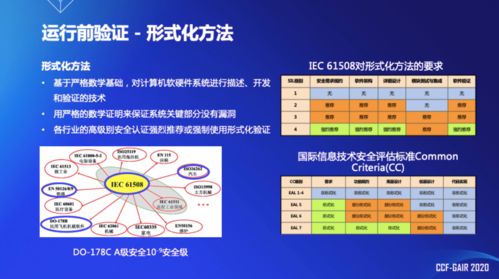
进程互斥是操作系统中确保多个进程在访问共享资源时不发生冲突的重要机制。软件实现方法通过算法设计避免硬件支持,常见方法包括单标志法、双标志先检查法、双标志后检查法和Peterson算法。这些方法各有特点,适用于不同场景。
- 单标志法:该方法使用一个共享标志变量来表示哪个进程可以进入临界区。当一个进程想要进入临界区时,必须检查标志是否允许自己进入。若标志指向自己,则可以进入;否则等待。这种方法简单,但存在强制轮转的问题,可能导致资源利用不充分。
- 双标志先检查法:该方法通过两个标志变量(如flag[i]和flag[j])表示进程的意图。进程在进入临界区前先检查对方标志,若对方未设置标志,则设置自己的标志并进入。这种方法减少了等待,但可能因进程同时检查而导致双方都进入临界区,违反互斥原则。
- 双标志后检查法:与先检查法类似,但进程先设置自己的标志,再检查对方标志。如果对方已设置标志,则等待。这种方法避免了同时进入的问题,但可能导致死锁,例如两个进程同时设置标志后互相等待。
- Peterson算法:这是一种经典的软件互斥算法,结合了标志变量和轮转机制。每个进程设置自己的标志并指定轮转顺序,通过检查对方标志和轮转变量来确保互斥。Peterson算法简单高效,适用于两个进程的场景,并能保证互斥、进步和有限等待。
在计算机系统中,软硬件实现互斥方法相辅相成。软件方法无需专用硬件,便于移植,但可能效率较低;硬件方法(如原子指令或锁机制)性能更高,但依赖特定平台。实际应用中,常结合软硬件优势,例如使用软件算法作为基础,辅以硬件优化,以提高系统可靠性和效率。理解这些方法有助于设计高效、安全的并发系统。
如若转载,请注明出处:http://www.bj-dodoca.com/product/7.html
更新时间:2026-04-20 15:47:36